How Robosaurus is Controlled
Frank Yaeple, Fluid Power Editor of Design News magazine shown wearing Robosaurus. Frank, the "pilot in training" is strapped up in the monster robot's cranium with a four point harness for his first Monster Robot driving lesson. Instructor Bob Correll (KiteCyclist and JetBike daredevil) is in the jump seat behind Frank. Frank told us this was absolutely the most fun he ever had in his entire life writing about a hydraulic engineering project!
The basic concept for this type of control must be attributed to famous Science Fiction author Robert Heinlein, whom decades earlier invented the idea of a "Waldo" - a machine you put on and control like it was an extension of your own body. (Yes, the same author who wrote "STARSHIP TROOPERS", which I enjoyed reading in the mid 60's and more recently enjoyed the ultra awesome special effects realism in the movie version. AND how come Diz dies after one bug's 3" diameter pincer is poked all the way though her back?? And later on, the heroin not only survives a similar 3" diameter spearing, but 5 minutes later is running at full speed and tossing around a 20 pound space rifle like it's a 1 pound pistol. Bad physics and bad biology, but I loved it anyway!)
If you remember the movie "Aliens 2", you'll probably also remember Sigourney Weaver's "Waldo" forklift that she "wore" to move big heavy cargo from place to place AND which she cleverly used as a weapon in the final combat scenes against the creature!
KEY ELEMENTS OF THE ROBOSAURUS CONTROL SYSTEM
Each of the pilot's arms are placed in a cuff restraint system. When the pilot moves his arms, Robosaurus's arms move in the same direction. Pilot's forearm UP results in Robosaurus's forearm moving UP. Pilot's shoulders rotated FORWARD results in Robosaurus's shoulder rotating FORWARD, etc.
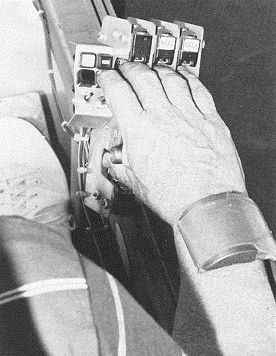
Also, all the pilot's fingers are simultaneously busy giving individual UP and DOWN commands for various functions. CLOSING the right middle finger and the right thumb together causes Robo's right side CLAW to close together, whereas SPREADING the middle finger and thumb apart causes the Claw to OPEN. The Pilot's INDEX fingers are especially busy. As can be seen above, each INDEX finger controls four push button commands and two toggle switches options.
In addition to all this arm and finger action, the Pilot must also control where Robo moves. Two P-Q Controls, Inc. proportional FOOT pedals are used as both throttle and steering wheel to drive Robosaurus around! Tilting both foot pedals FORWARD causes Robo to drive straight ahead. AND the more the Pilot's feet tilt the pedals, the faster Robo goes! Tilting both feet BACK causes Robo to move BACKWARD. To spin to the right, the Pilot applies downward tilt to the LEFT pedal and backward tilt to the RIGHT pedal. It is very important for the Pilot to coordinate all arm, finger and foot motions simultaneously. It is difficult and takes lot of practice, but it is this essential training that enables Robosaurus to move about in such a lifelike manner during a show!
![]()
![]()
![]()